一番下に追記あります。
いろんなモーションを再生していると、ときどき、転倒してしまうことがあります。
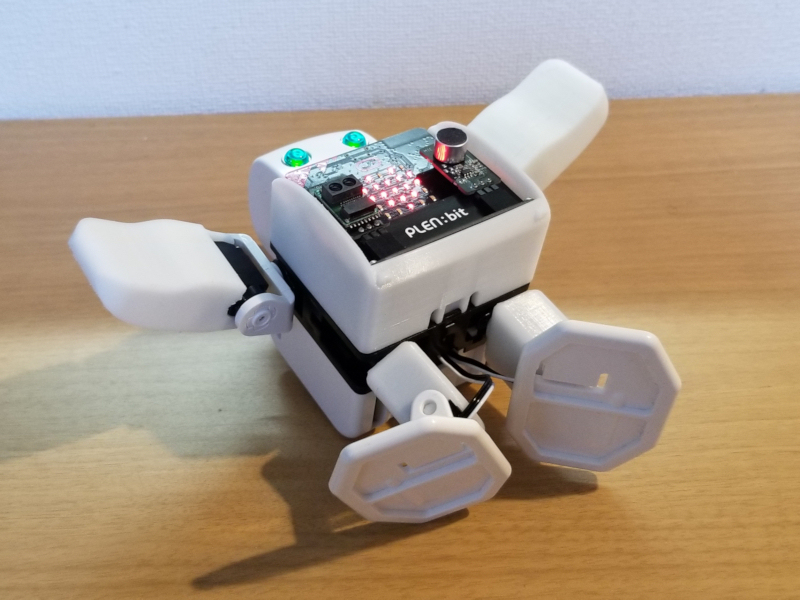
ドテーン!
充電池が重くて、重心が後ろよりなので仕方ないかなー、と思いつつ、パーツを調べてみると…

足がチョコっと浮いてた!
うーん、ちょっと斜めになってる感じですね。
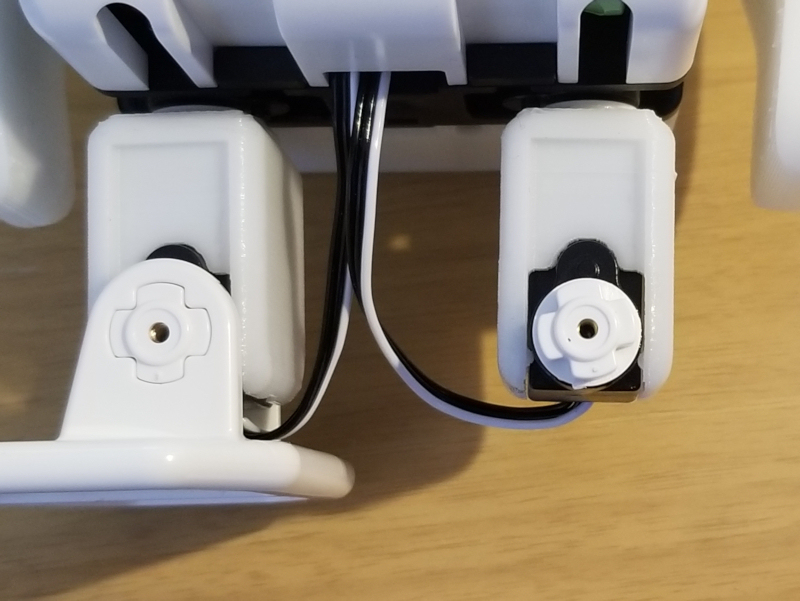
部品セットする時に、なるべく上下左右を合わせようとはしたのですが

ギアのギザギザに組み合わせるタイプなので、微調整ができず。サーボの標準位置にはサーボごとの個体差があるので、うまくいくかどうかは運任せになります。
なんとかならないかなー、と、部品を付ける向きを90度変えてみたところ…

おおお!さっきよりかなりまっすぐになった!なるほど、こういう微調整の方法が取れるのか!

接地バッチリじゃないか!
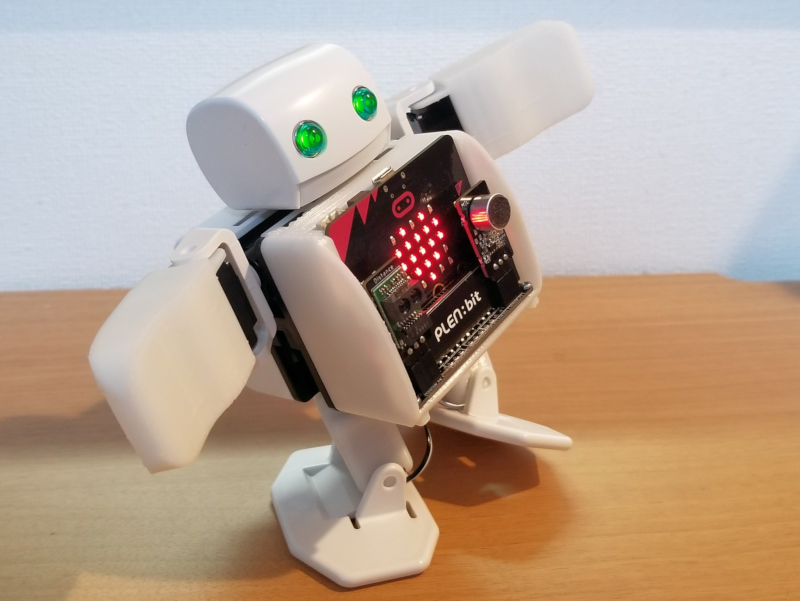
ほとんど転倒しなくなりました!
「右パス(モーション28)」だけは苦手っぽくて、これだけ調整後も時々転倒します…。まあ、他は安定してるのでじゅうぶんです!
あと、びみょーうに腕が斜めな気がする…。これぐらいならぜんぜん許容範囲内ですけれど。

同じように微調整できるかな、と思ったのですが、腕の部品は、部品を直接取り付けるタイプなのでできなかったです。

残念。
あと、これは効果あるかどうかわからないのですが、充電池が固定されてないのもバランス崩す原因な気がします。
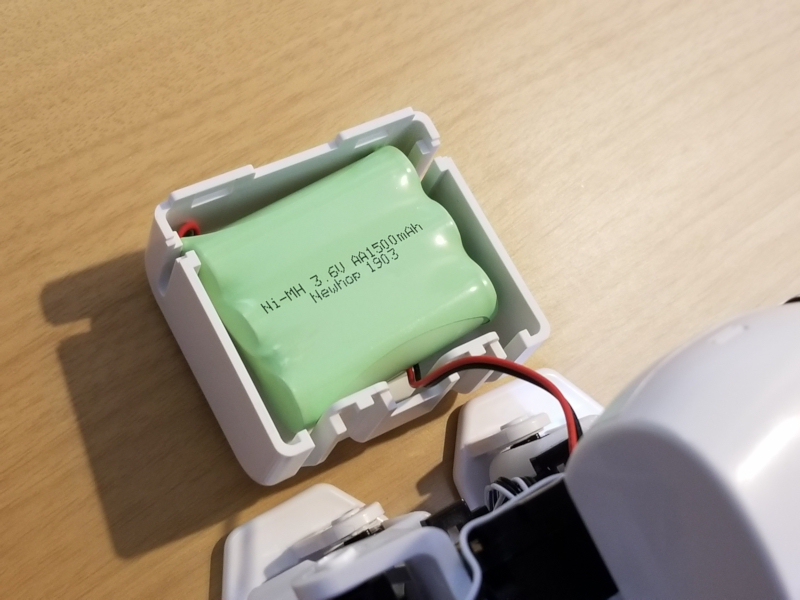
これだけ重い物体が背中側でカタカタ動くと、ロボットにとっては結構な衝撃になるはず。

緩衝材を詰めて固定しておきました。
(追記)その後、サーボモータの初期状態を調整するプログラムが公開されました。拡張機能 Ver.0.0.4以降で追加された機能を使っています。
調整内容は、PLEN:bit 本体のEEPROMに登録されるので、再起動しても調整反映されます!
[Kickstarter] PLEN:bit Update
https://www.kickstarter.com/projects/2107823129/plen-bit-sensor-controlled-robot-using-the-micro-b/posts/2533097
モーション再生時は補正値が反映されるのですが「サーボモータ〇番を〇度にする」でサーボの角度を直接指定する場合には、登録された補正値を使って自分で補正する必要ありそうです。
補正値はプログラムから plenbit.servoSetInit[0] ~ plenbit.servoSetInit[8] で参照可能でした。補正後の角度初期値が10倍の値で入っています。