最初から組み込まれているモーションの再生ではなく、自分でモーションを作ることもできます。
はい、できるのですが…。

これを行う場合、「何番のサーボの角度を何度にする」みたいな直接のサーボコントロール指定になって、いきなり難しくなります。
何が難しいって、各サーボで、初期値、最小・最大値、サーボの回転の向きがバラバラなんですよね。
値を間違えると、サーボの動作可能範囲外まで無理やり動かそうとしてギーギーうなり始めたりして、もう大変です。
サーボの番号や値については、koyokoさんの説明が詳しいです。
ロボットでインタラクションを学ぶ
https://note.mu/koyoko/n/ne458d586ed9d
サーボ値の一覧表は、ホントすばらしい。モーションを作成するときには、印刷して貼っておくべき資料だと思います。
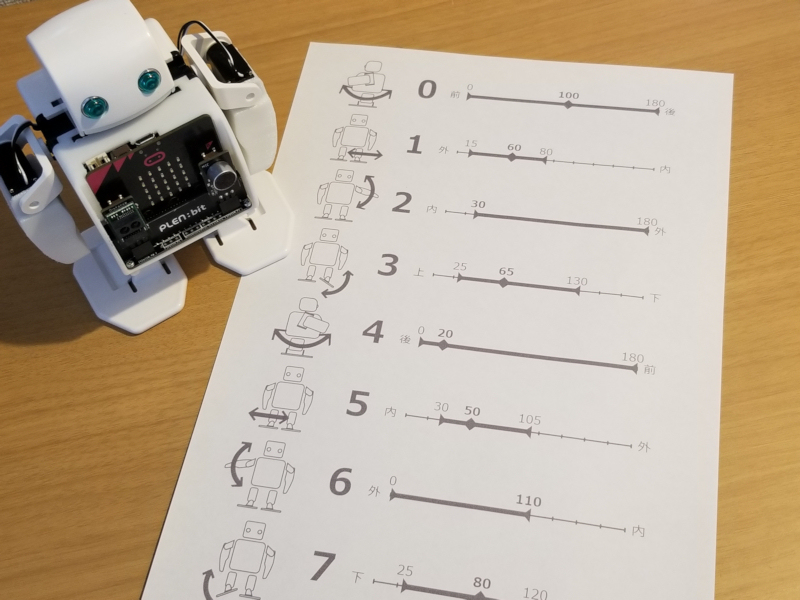
僕も印刷しました!モーション作成するの、この資料なしじゃ無理ですよね。
サーボの値を直接設定できると、できることは何でもできるので、この関数が用意されているのはすごくありがたいです。
その上で、もうちょっとお手軽に「右手を前方90度にする」ぐらいの指定ができる関数もあればいいのになーと思います。
ということで、ちょっとやってみます。腕だけをマニュアルで操作。
立ち上がれ PLEN:bit! pic.twitter.com/JCJj87SNvE
— Nochi (@shikarunochi) 2019年5月19日
立ち上がれ~
PLENガンダム! pic.twitter.com/7uWakpffp0
— Nochi (@shikarunochi) 2019年5月19日
体が重くて、このぐらいからの立ち上がりで限界でした。 pic.twitter.com/c2jc2Mq6W8
— Nochi (@shikarunochi) 2019年5月19日