サーボモータが組み込めるように、アゴのパーツに穴をあけていきます。
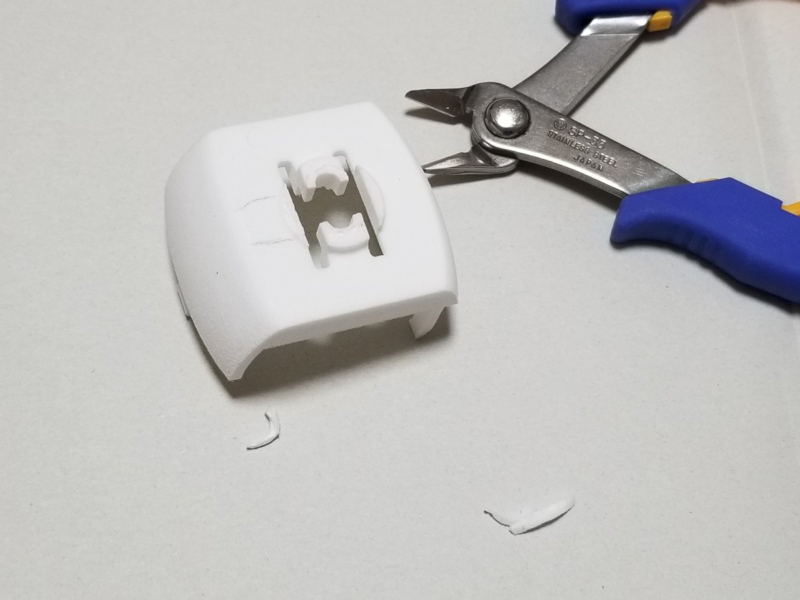
大胆にパチパチ・ザクザクと。
こんなもんかな。

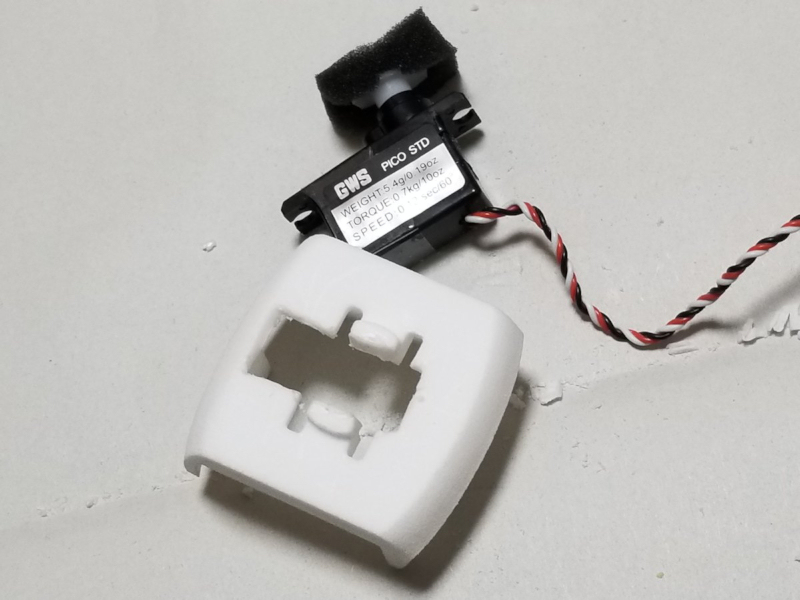
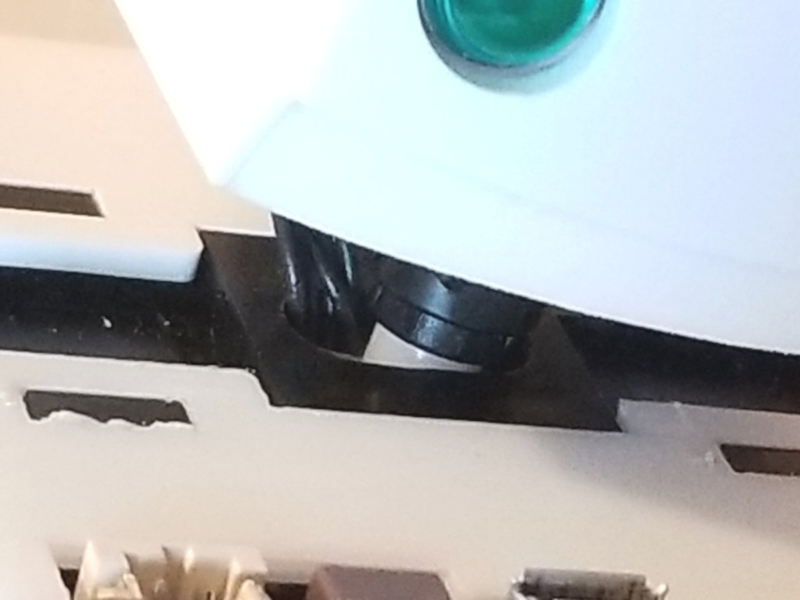
すっぽり。
下側から入れて、いい感じにピッタリ入りました!ねじ止めの部分が、支えになる感じ。
これでバッチリ!…と思ったのですが、うぅ~ん、首が長いですねえ…。

ちょっと長めの bpi:bit と組み合わせれば、ごまかせる感じではあります。
これ以上差し込みたいならば、首側の穴をもっと大きくする必要がありそう。
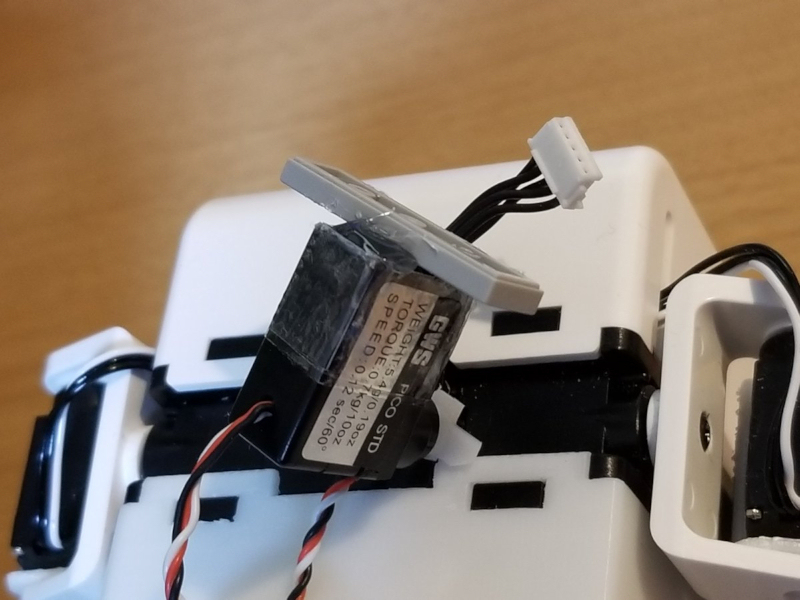
これは、顔の内側からはめ込んだ方がいいのかも。
おお、いい感じに入りそうだ…。
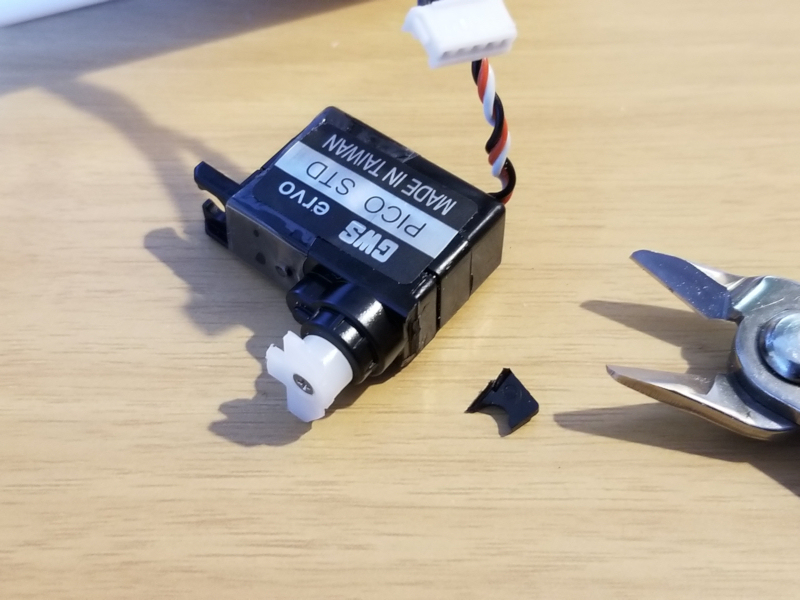
ジャマになっているサーボの出っ張っている部分を思い切ってパチっと切り取り…!

最初、パーツに大穴を開けてしまったのが完全に失敗だった感。
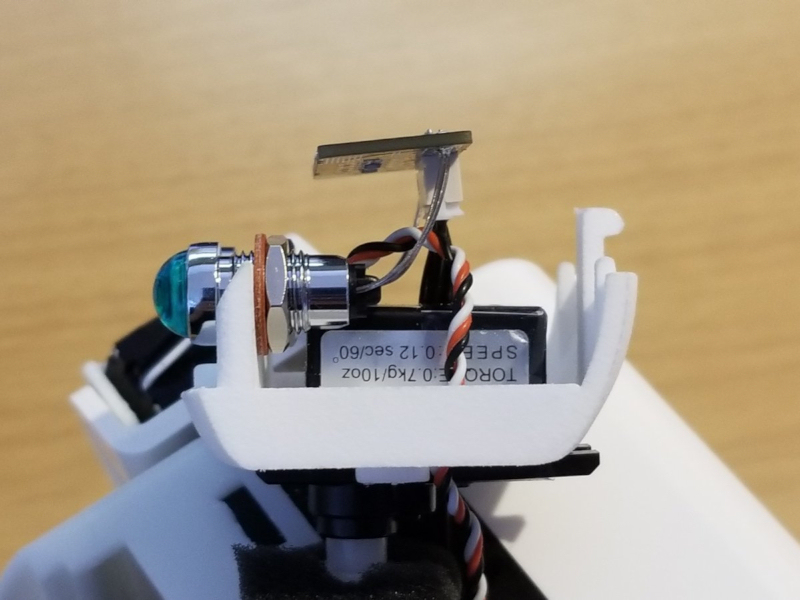
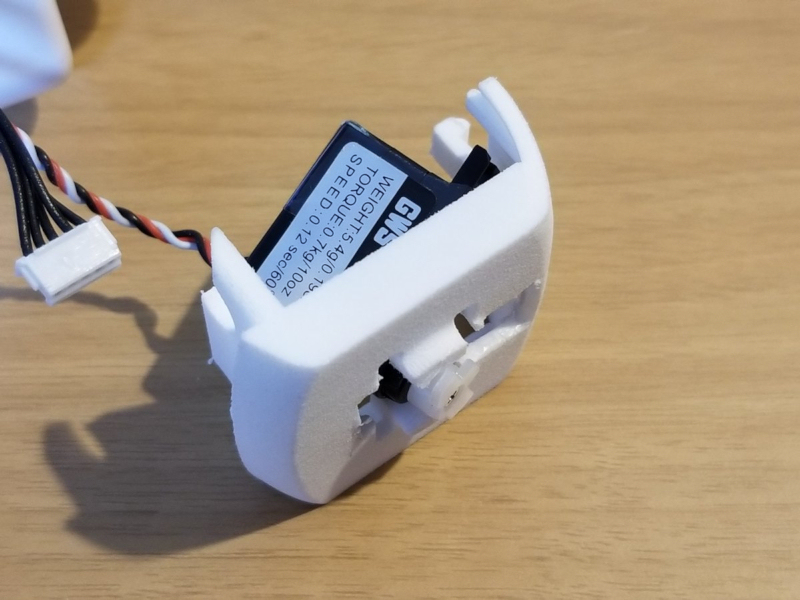
サーボモータを固定するために、レゴブロックの適当なパーツをホットボンドで固定しました。

外から差し込んだ時よりも少々狭くなったけど、何とか入った!
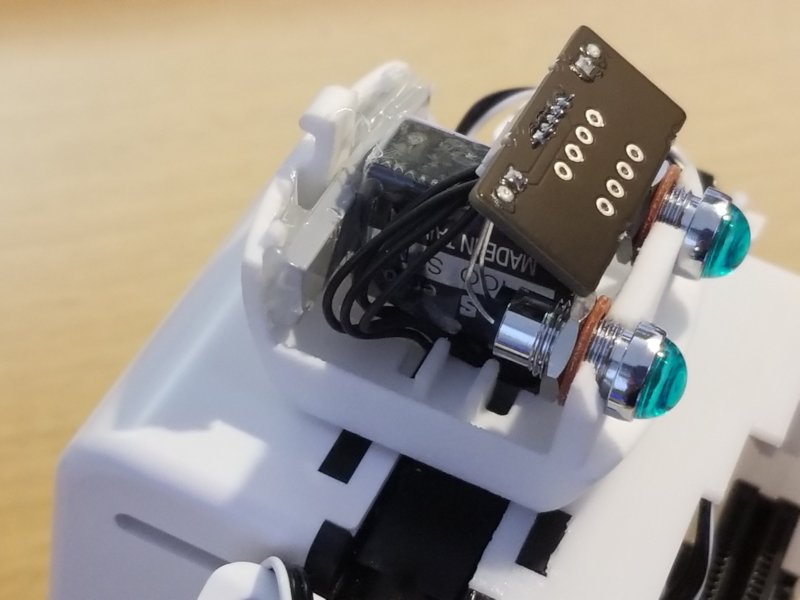
左右に動いたときにガタガタしないよう、ホットボンドでガチガチにしました。


おお!バッチリー!
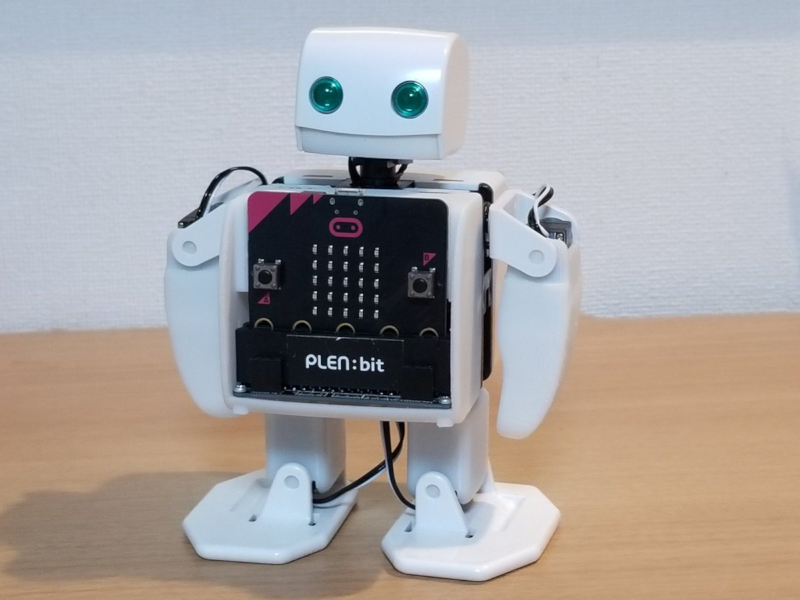
でも、頭パーツとボディパーツは固定されてないので、ちょっとしたはずみで
すぐに頭が取れてしまいます…。(昔のギャグマンガのロボットみたいだ)
今のところはひとまずこれでOKとします。内部からゴムとかで引っ張るのがいいかも。
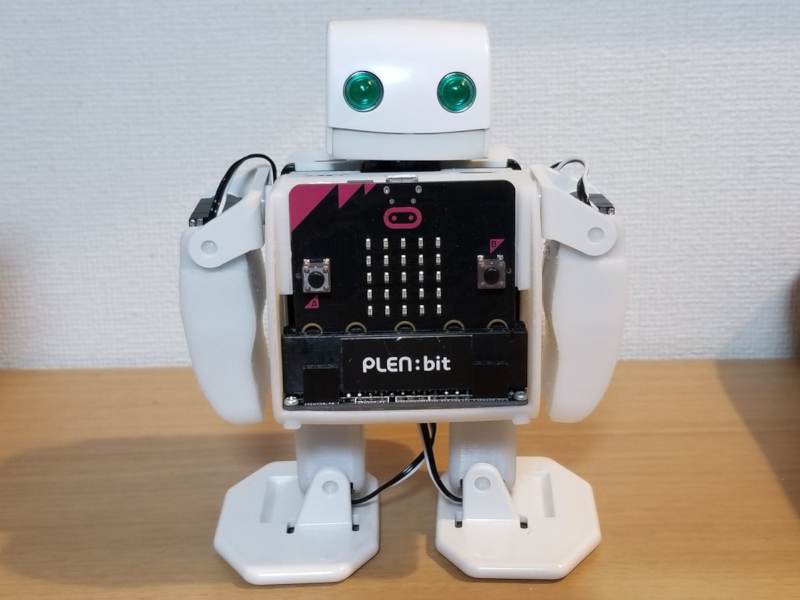
PLEN:bit、首回転のサーボ搭載できました!やったー! pic.twitter.com/y4MGROVrz2
— Nochi (@shikarunochi) 2019年7月6日
バッチリだー!
あと、これはどうしようもないことなんですが、サーボドライバの電源を入れると、サーボが0位置に移動してしまいます。首サーボは、自分で初期値を設定しないといけないのです。
自分でプログラムする場合は、初期設定に追加しとけばいいのですが、他の人が作ったhexファイルを使って動かそうとすると、もちろん首サーボの初期設定は無いので、首が横を向いてしまうのです…。
自分のプログラムを動かさないときは、首が前を向いた状態でサーボのコードを抜いておく必要がありますね。