PLEN5Stackのサーボ接続端子は8個ありますが、ロボット本体のサーボ8個の制御ですべてを使い切っています。

追加した首サーボの制御をどのように行うのがよいか考えました。
首サーボ追加についてはこちら。
PLEN:bit:首振りサーボモータ組み込み
http://shikarunochi.matrix.jp/?p=3470
M5StackのGROVE端子を使えばいいと思ったのですが、本体サーボ制御用のI2Cと同じラインにつながっていまして、I2C以外の用途に使うことは無理でした。

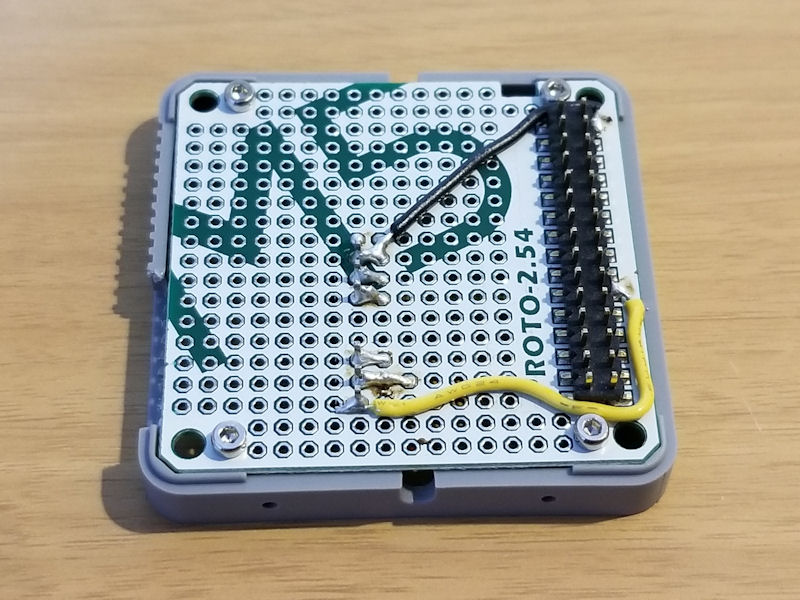
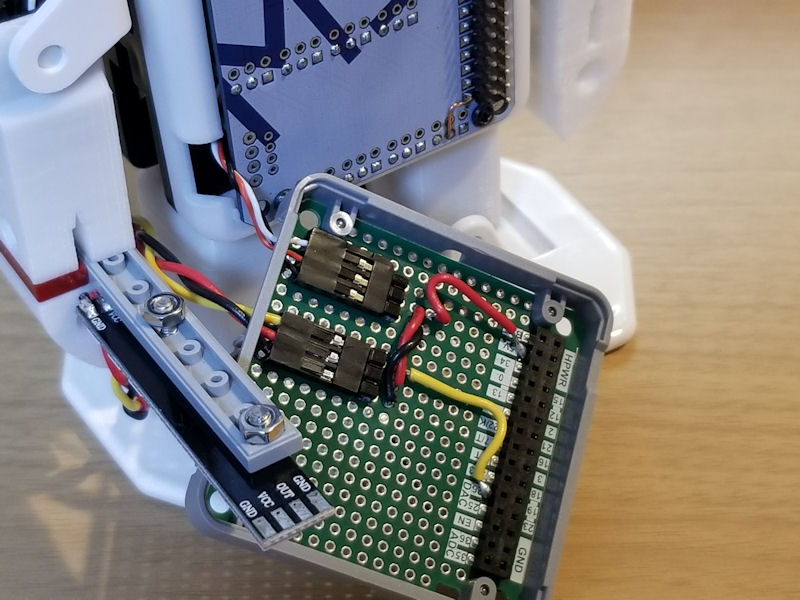
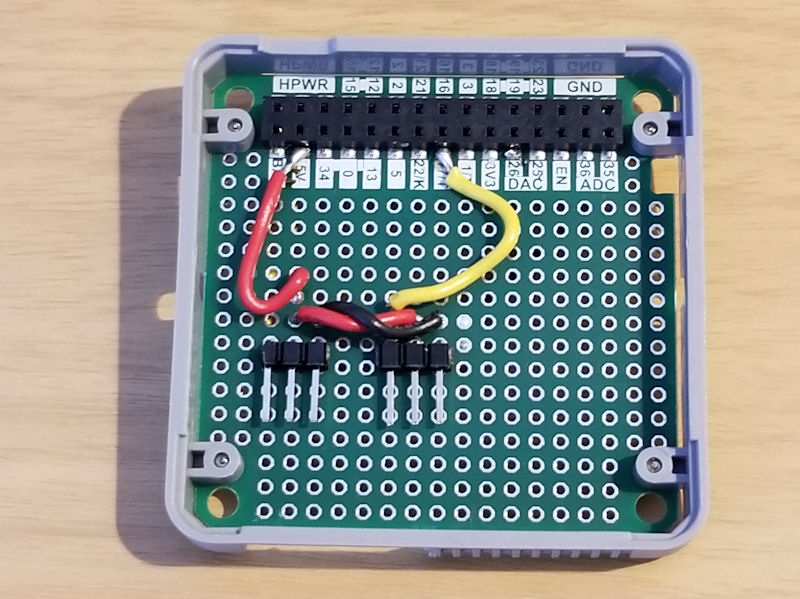
ということで、端子の追加をする必要があります。M5Stack プロトモジュールを使って必要な端子を引き出しました。

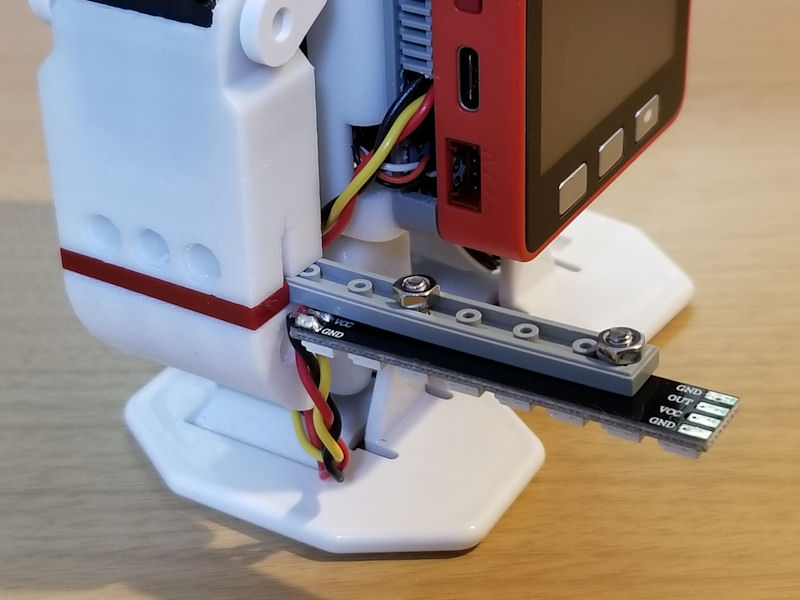
L型ピンヘッダで、首のサーボ用とせっかくなのでもう一つ端子を追加します。信号/5V/GNDで3本ずつ。
接続する先は、汎用GPIO(G2 / G5)がよかったのですが、G5は目玉部分のLED制御で使っているので、それは使えません。
その代わりに、M5Stack FIRE Bottom の GROVE PORT B に出てる G26をつないでおきました。あと 5V / GND をそれぞれつなぎます。
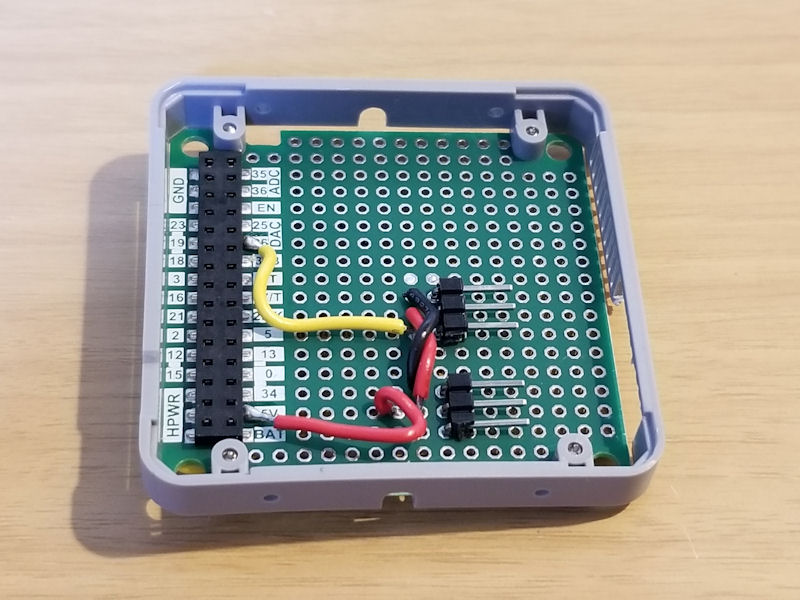
側面に、コードを通す横穴も開けました。
2つ目の端子には、NeoPixel LEDを接続してみます。せっかくなので、手に持たせましょう!
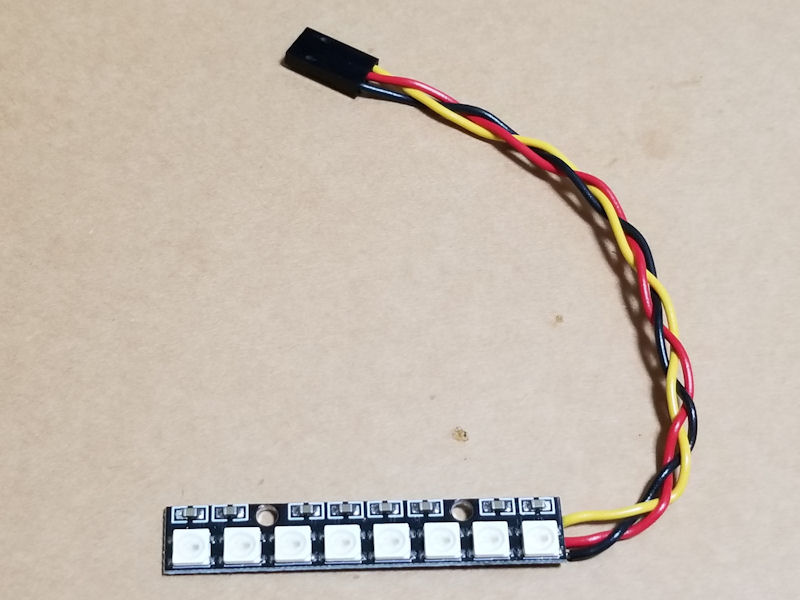
接続しやすいようにケーブルメスピンと3連ハウジング使いました。圧着工具持ってると、こういう工作がパッとできるのがとても良いですね。
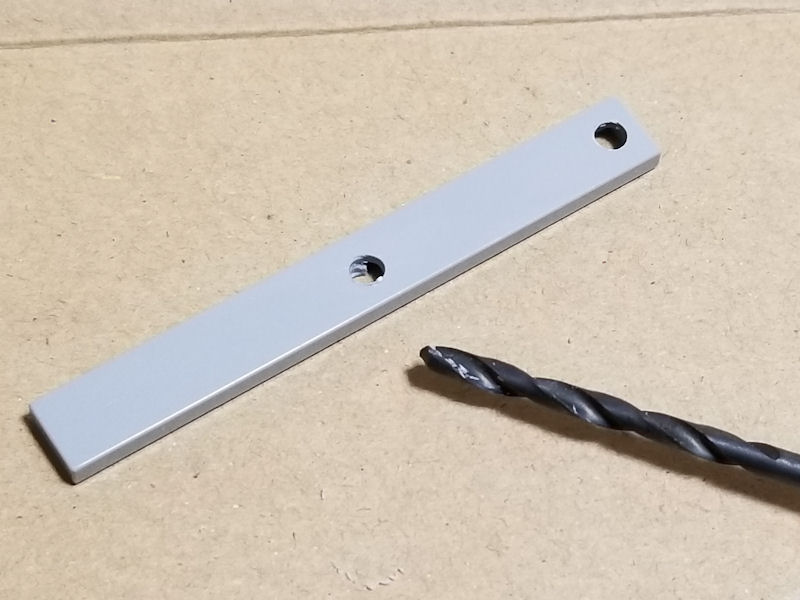
腕への固定は、レゴブロック。長めのプレートパーツに、NeoPixelに合わせてピンバイスで穴あけ。
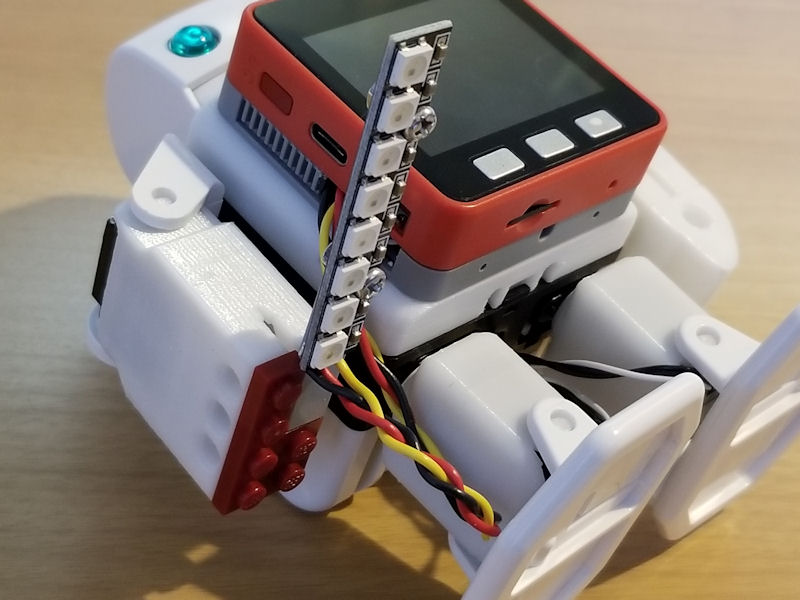
ブロックでしっかり固定できました!
完成!
その後、いろいろ試していたのですが、うまく NeoPixelが光ってくれません…。AquesTalk でしゃべらせていると、G26端子は使えないみたいでした。DACとして使われているのかな…?
シリアル接続2つは使わないと思うので、G17 (TXD2) に接続を変更しました。
これでAquesTalkとNeoPixel両方使えますー。
必殺!プレン・ブレード!#PLEN5Stack #M5Stack #PLENbit pic.twitter.com/fdbxE2vsOY
— Nochi (@shikarunochi) 2019年11月2日
カッコいいー!