PLEN:bit をM5Stackでコントロールできたらいいのになーと思っていろいろやっていたのですが、公式PLEN Project からPLENとM5Stackが合体したロボットが登場しました!その名も「PLEN5Stack」!
2019/10/23からKickstarterでクラウドファンディングが始まっています!
PLEN:bit : That are easy to customable robot for developers
https://www.kickstarter.com/projects/2107823129/plen-bit-that-are-easy-to-customable-robot-for-developers

これまでPLEN:bitでいろいろやっていたのをPLEN Projectの方に見ていただけていまして、PLEN5Stackの試作版パーツをテストさせてもらえることになりました!
確認できる範囲で、PLEN5Stackについてレポートしたいと思います。先行評価版ということで、実際の製品とは仕様が変わるかもしれないので、その点はご了承くださいー。
PLEN:bit とは、胸パーツと腕パーツが異なります。
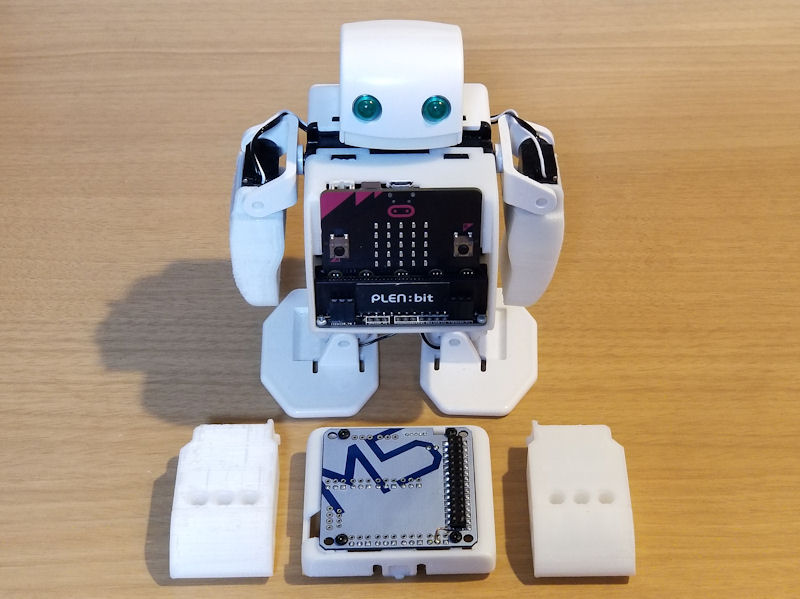
腕パーツは、LEGOブロックを固定するための穴が開いています。手の先が外れて、ブロックを差し込めるようにもなっています。
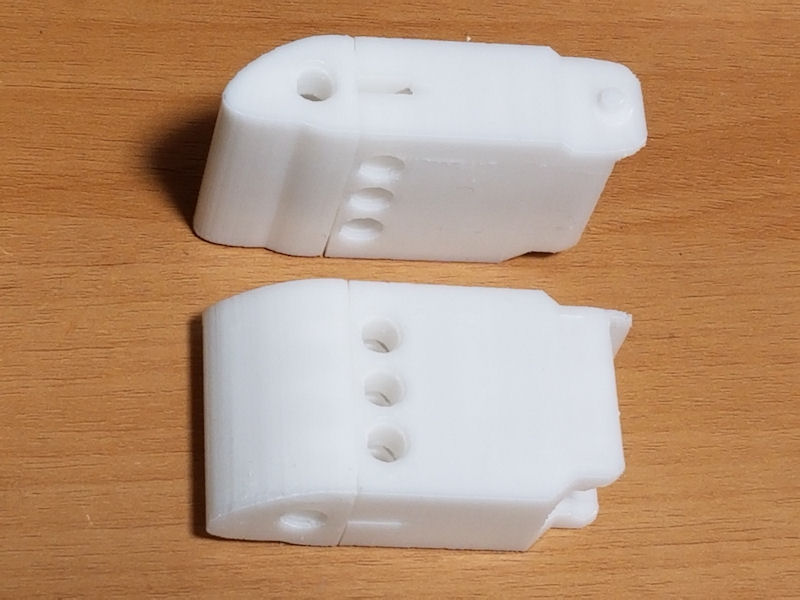

今回のKickstarterでは、PLEN5Stackだけでなく、PLEN:bitもこちらの腕パーツになっていますね。
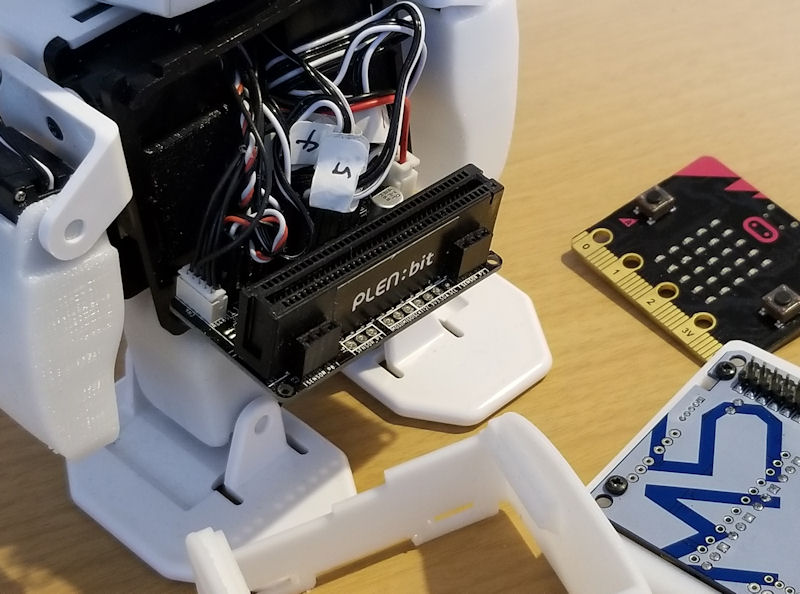
PLEN:bitとPLEN5Stackの大きな違い、胸パーツです。表側には、M5Stack と接続するためのM5Stackおなじみのコネクタが出ています。

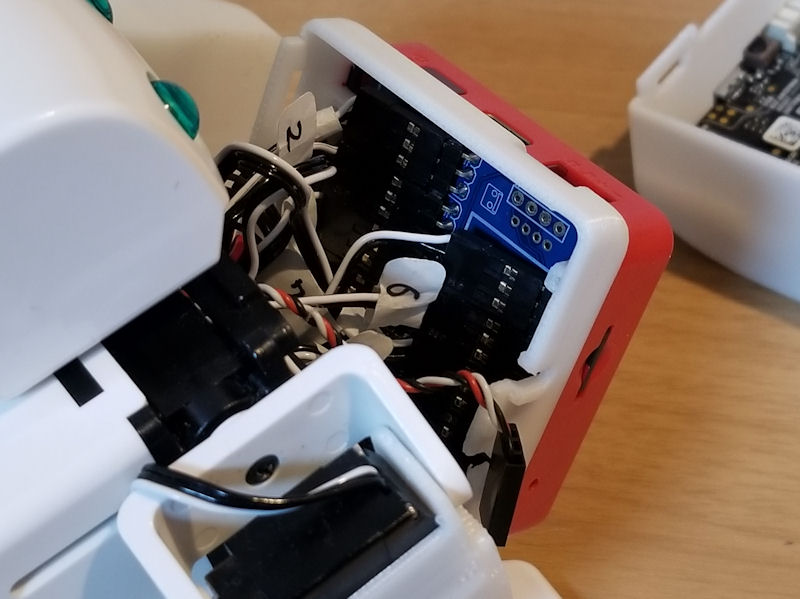
裏側は、8つのサーボ用コネクタがあります。

サーボコントローラはPLEN:bitと同じものが使われているとのことです。
PLEN:bitと同じサーボコントローラということは、機能的にはサーボ12個までコントロールできると思われるのですが、端子スペースの関係なのか、接続できるのは8個だけでした。ちょっと残念。
サーボ端子に余裕があると、首にサーボ追加して左右に動かしたり、腕にサーボ追加して物をつかんだりできるので、製品版では、なんとかうまいことやって拡張できるような仕組みをつけてほしいとこですね。スペース的になかなか厳しいとは思いますが…。

M5Stackを差し込むとこんな感じ。サイズぴったり!
それではパーツ換装!
コードがたくさんあるので、なかなかの混雑ですね。
胸パーツを取り換えて、動作確認のため電源をON!

むむ、なんとなく、立ちポーズが微妙に…。足が浮いてしまった。
サーボの初期位置がPLEN:bitとは微妙にズレてしまいました。手足のパーツを付けなおして、微調整しました。プログラムでサーボ初期位置を調整する方法でもいいと思います。
再度電源ON!腕も新型に取り替えました。

足がまっすぐになりました。いい感じ。
以前に、無理やりM5Stackと合体させてみたバージョンと比較すると…
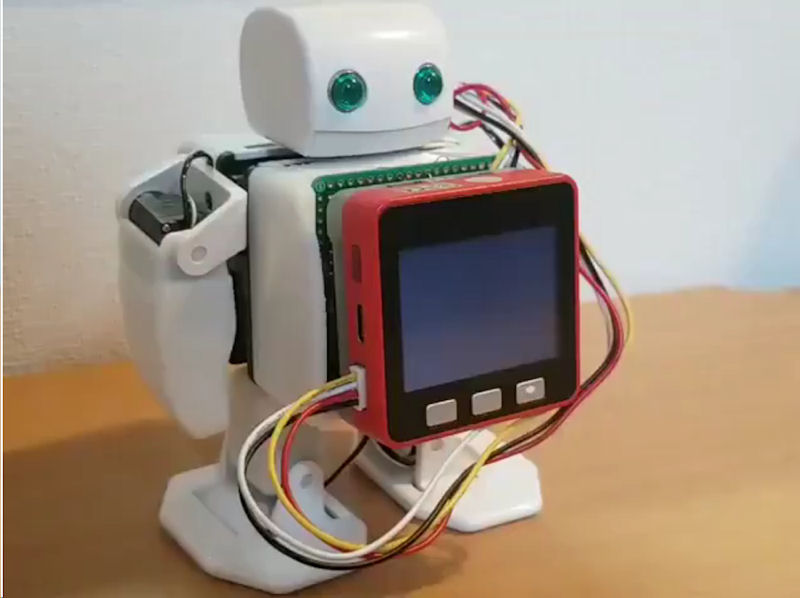  ← before : after → |
とってもすっきりしました!
LovyanLauncherでI2Cアドレスを確認。
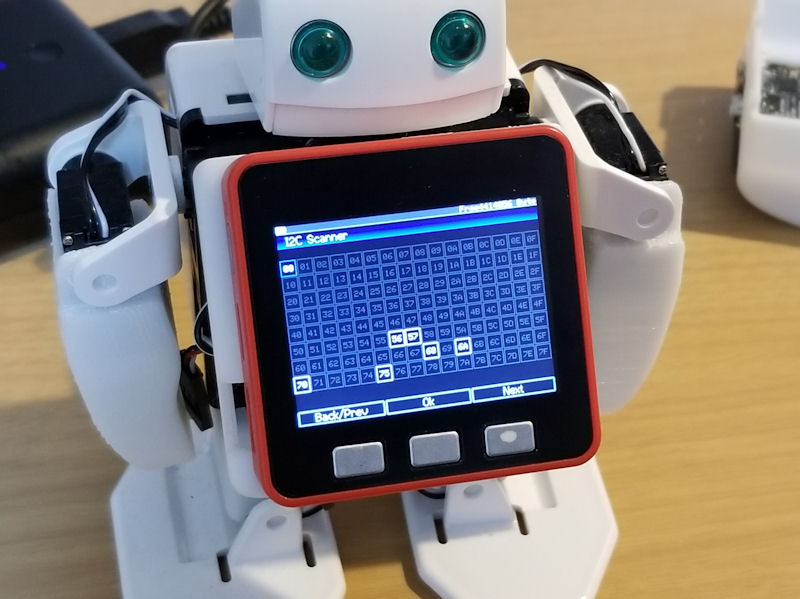
公式からいただいた情報によれば、
0x6A : CA9865
0x70 :IP5306
0x56 :EEPROM
とのことでした。
サーボコントローラはPLEN:bitと同じものとのこと。アドレスも同じでしたので、以前に確認した情報がそのまま使えました。EEPROMにはモーションデータが入っています。これも以前に確認した情報で読み出しできました。
目のLED点灯はG5でコントロールです!Lチカできます!
ということで、これらの情報をもとに、動かしてみました!
かわいいです!#PLENbit #PLEN5SStack #M5Stack pic.twitter.com/GtARYJLj5v
— Nochi (@shikarunochi) 2019年10月24日
音声合成は AquesTalk-ESP32 を使いました。
N.Yamazaki’s blog:「AquesTalk-ESP32 Ver.2.0」を使う
http://blog-yama.a-quest.com/?eid=970195
日本語表示は、たなかまさゆきさんのM5Stick用日本語ライブラリを使いました。
Lang-Ship: Arduino(M5StickC)でefont Unicodeフォント表示 完結編
https://lang-ship.com/blog/?p=646
ありがとうございます。